轨道式智能巡检机器人系统通过搭载视频设备和传感器,沿轨道对电力设备进行巡检,能够实现变电站室内设备自主智能巡检和监控,也可以人工操作,获取需要检测设备的重要信息。本检测系统大大提高了检测的范围,提高了巡检的效率和智能化水平。
轨道式智能巡检机器人系统组成
水平运动机构:由内部齿轮和八组从动滚轮组成,支持50m/min的直行速度, 机器人底盘模块具有强大过弯能力,转弯半径不低于60cm,真正的做到在特殊复杂环境中检测无死角。
安全防护模块:采用红外光电传感器进行安全防护,机器人能自动探测周围环境,当识别到在巡检路线上存在障碍物且不能安全通过时,能自动停车并报警
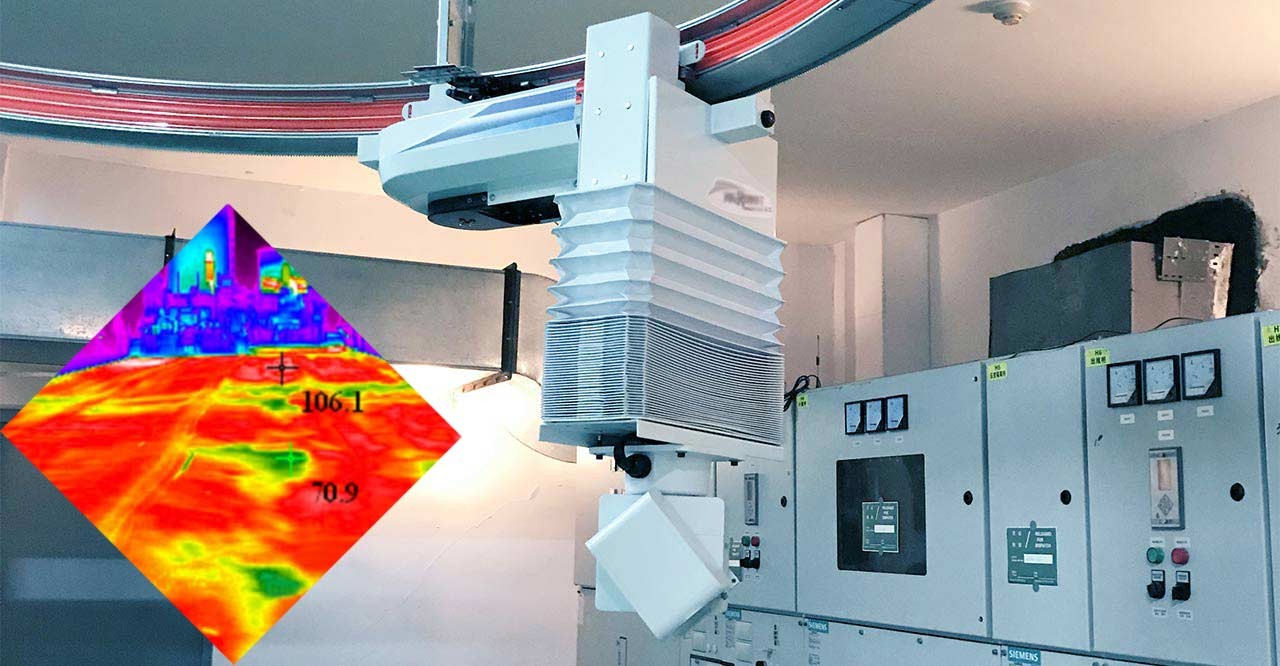
前端搭载模块:前端搭载模块用于搭载可见光摄像仪、红外热像仪和局放。同时,为满足特定设备状态监测和操作、行业业务处理等定制服务,检测单元支持搭载多种传感器,如气体、温度传感器等。
轨道式智能巡检机器人通信
前端监控设备的数字信号通过系统内部的通讯通道进入接口控制箱,再通过网线接入后台服务器,服务器经过交换机/路由器,*终分配给网络客户端、网络硬盘录像机(NVR)、解码器等,实现监控、存储和显示;
本系统中,用户的集成平台软件在实现控制前端监控设备的同时,也要同步要对机器人发送控制指令,以便实现两者同步预置位功能;
本系统的机器人与前端监控设备为双IP控制方式,服务器首先注册两个设备的IP地址及端口,控制时需同时向两个绑定的IP地址发送指令,以使前端监控设备与机器人之间保持协同动作;
客户端通过访问服务器控制设备并传输音视频资料;
轨道式智能巡检机器人系统平台
系统具备提供巡检时采集、存储可见光和红外视频的功能,并支持视频的播放、停止、抓图、录像、全屏显示等功能。
系统提供巡检点上采集、存储的红外热图功能,并能够从红外热图中提取温度信息。
系统提供手动控制和自动控制两种对机器人的控制方式,并能在两种控制模式间任意切换。手动控制功能可实现对机器人底盘、伸缩模块、可见光摄像机和红外热像仪的控制操作。自动控制时,系统能够在全自主的模式下,根据预先设定的任务或者由用户临时指定的任务,通过机器人各功能单元的配合实现对设备的检测功能。
任务规划功能的可编辑巡检点不少于255个。系统软件人机界面无效点击操作少、操作方便,信息显示清晰直观,对操作人员的专业能力要求低。